In June 1995 as the first Analysis Center within the IGS, CODE started to perform ambiguity resolution for GPS (for the global analysis). In February 2011, the same became true for GLONASS. As documented in the CODE analysis summary of GPS week 1625 (Schaer et al., 2011), ambiguity resolution was extended to GLONASS for three different resolution strategies. CODE’s extended GNSS ambiguity resolution scheme as performed in operational mode may be summarized as follows:
- Up to 6000km (3000km in a first precise orbit determination step): Melbourne–Wübbena widelane and subsequent narrowlane ambiguity resolution are restricted to GPS only.
- Up to 2000 km: Quasi–Ionosphere–Free (QIF) L1/L2 AR for GPS and in addition for GLONASS double-difference ambiguities with the same frequency channel numbers.
- Up to 200 km: Phase–based widelane ambiguity resolution for GPS and GLONASS, including retrieval of GLONASS single-difference ambiguity initialization biases; narrowlane ambiguity resolution for GPS and GLONASS, considering the previously retrieved single difference bias values.
- Up to 20 km: Direct L1/L2 ambiguity resolution for GPS and GLONASS, including retrieval of GLONASS single-difference ambiguity initialization biases. The widelane–based single-difference bias retrievals may be considered as a priori bias information.
The success rate of the ambiguity resolution for the GPS observations was not reduced by activating the resolution algorithms for GLONASS:
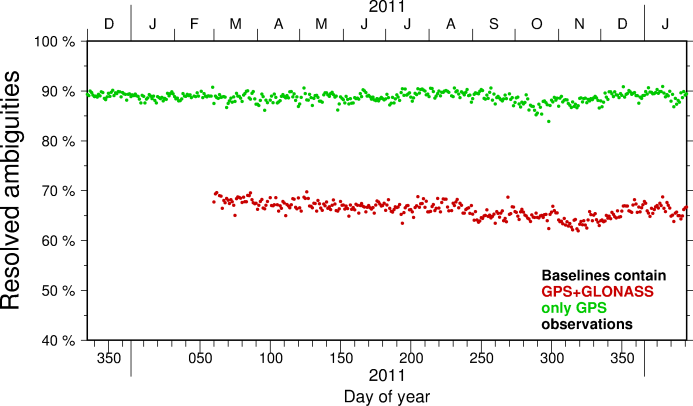 Success rate in percent
Success rate in percent
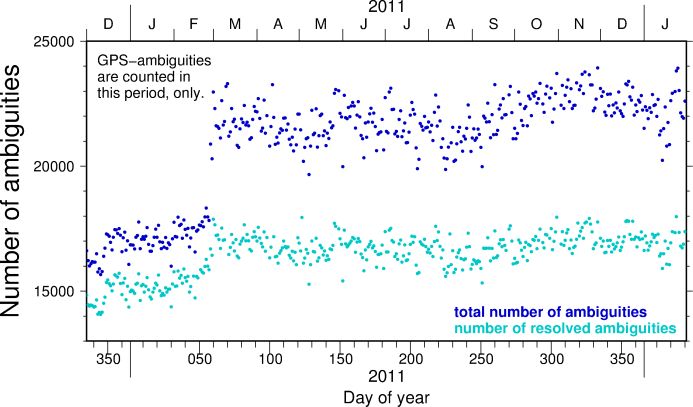 Number of float (total) and fixed ambiguities
Number of float (total) and fixed ambiguities
The benefit from the ambiguity resolution for the GLONASS observations is clearly visible in the figure below:
 Median of the (satellite-wise) RMS from a three–day orbit fit with a number of events in the CODE processing indicated. It is remarkable that GLONASS ambiguity resolution improved the orbit determination for the GPS satellites as well.
Median of the (satellite-wise) RMS from a three–day orbit fit with a number of events in the CODE processing indicated. It is remarkable that GLONASS ambiguity resolution improved the orbit determination for the GPS satellites as well.
We consider the following rules essential for successful GLONASS ambiguity fixing:
- GNSS ambiguity parameters are generally treated at single difference level.
- GNSS ambiguities are resolved at double-difference level (differences of single-difference ambiguities).
- The single-difference ambiguity parameters directly respond to (always) existing single-difference (ambiguity initialization) biases. Implicitly, they act as single-difference bias calibration parameters and thus may absorb present single-difference biases in the least-squares parameter adjustment.
- The initial singularity concerning all involved single-difference ambiguity parameters has to be eliminated by imposing loose constraints on these parameters. After fixing a first GLONASS double-difference ambiguity for a pair with unequal frequency channel numbers, single-difference ambiguity parameters become determinable.
- There are no extra bias parameters at double-difference level, apart from (unresolved) intersystem ambiguity parameters (see next item).
- GPS–GLONASS intersystem ambiguities are generally treated unresolved.
- A self–calibrating ambiguity resolution procedure (as used at CODE) is definitively indispensable.
References for further readings:
Schaer, S. , E. Brockmann, M. Meindl, and G. Beutler (2009). Rapid Static Positioning Using GPS and GLONASS. In: Ihde, J. and H. Hornik (Eds): Subcommission for the European Reference Frame (EUREF), Firenze, 2009.
S. Schaer and M. Meindl (2011). Multi-GNSS Ambiguity Resolution Algorithms, chapter Commission 4: Positioning and Applications, pages 95–96. Swiss National Report on the Geodetic Activities in the years 2007-2011 to the XXV General Assembly of the IUGG, Melbourne, Australia, 28 June - 7 July 2011. Swiss Geodetic Commission, 2011.
Dach R, Lutz S, Walser P, Fridez P (Eds) (2015) Bernese GNSS Software Version 5.2. Documentation, Astronomical Institute, University of Bern, Bern. ISBN: 78‐3‐906813‐05‐9 ; DOI: 10.7892/boris.72297.